- 公司
- 爱游戏ayx守望先锋
- 目录
- 新闻和趋势
- 展览
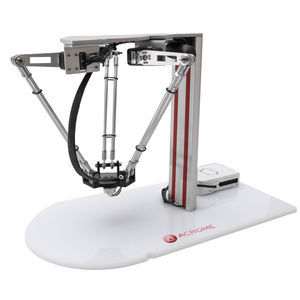
铰接式机器人ACROBOT
协作
平行
六轴




添加到收藏夹”
这种产品比较
特征
- 类型
- 清晰的、协作的、平行的
- 数量的轴
- 六轴
- 函数
- 测试
- 应用程序域
- 应用程序
- 其他特征
- 自定义
- 有效载荷
-
2公斤(4.409磅)
- 达到
-
960毫米(37.8英寸)
- 可重复性
-
0.1毫米(0.0039英寸)
描述
ACROME Acrobot是系统定制的一只机器手关节的选择作为一个测试床上协作机器人,智能控制系统和工业4.0。概述ACROBOT 6自由度机械臂,其高技术联合执行机构,是一个动手实验,关闭之间的差距实际工业系统和DIY——的方法。用户可以理解的复杂的逆运动学算法和快速原型新的工业并联机器人运动控制体系结构。ACROBOT使学生和研究人员设计复杂的应用程序和为他们提供行业4.0的世界。完全开源软件成为可能,研究人员可以修改和测试他们的发达算法。虚拟仪器软件选项,实时(可选),FPGA(可选)的MatLab / Simulink仿真平台选择本地PC (Windows) Digital-Twin功能组装6自由度连续运动手臂机器人铝铸联合结构每一个关节都有齿轮减速后高分辨率绝对编码器。+ / - 0.1毫米重复性动作精度高智能的机器人伺服致动器(3.5 - 4.5弧分反弹)2公斤有效载荷在最大范围。960毫米的工作区位置、速度和转矩(电流传感)可以控制与MATLAB®/仿真软件完全兼容®和虚拟仪器™Denevit-Hartenberg公约模型在MATLAB / Simulink仿真®®系列运动手臂机器人和虚拟仪器™使用户能够创建自己的实时算法开放源码软件架构与广泛的课件,适合本科生和研究生课程的机器人控制系统
视频
目录
不用于本产品目录。
看到ACROME所有的目录