
{{product.productlabel}}{{product.model}}
{{#if Product.featureValues}}}{{Product.ProductPrice.FormattedPrice}}}{{#if Product.ProductPrice.PriceType ===“ Price_range”}}}- {{{product.productprice.formattedpricemax}}}{{/如果}}
{{#each Product.specdata:i}}{{姓名}}:{{value}} {{#i!=(product.specdata.length-1)}}}}
{{/end}}} {{/erven}}
{{{{product.idptext}}}}
{{product.productlabel}}{{product.model}}
{{#if Product.featureValues}}}{{Product.ProductPrice.FormattedPrice}}}{{#if Product.ProductPrice.PriceType ===“ Price_range”}}}- {{{product.productprice.formattedpricemax}}}{{/如果}}
{{#each Product.specdata:i}}{{姓名}}:{{value}} {{#i!=(product.specdata.length-1)}}}}
{{/end}}} {{/erven}}
{{{{product.idptext}}}}

... shir-3000ex防爆型防爆型防爆型検查石油・の现场现场における防爆防爆防爆要求要求満たし満たし,油田油田・ガス田の日常点検点検点検におけるにおける强度低减效率向上,点検作业效率を実现します。。自律型マッピングマッピングとと位置决めインテリジェントインテリジェントな操作操作ととととメンテナンスメンテナンスリアルリアルタイムタイムタイム...

...制品のこのははははため火救助人员を取り替え,效果效果的に障害を発电発电発电発电発电発电発电発电発电のののののののの减速减速减速モーターモーターののの360度90度度度ののの型型防爆防爆防爆防爆防爆防爆防爆防爆型のの度度度度度度度度度度ピッチのカメラ付き

flir sugvは可能一人乘りロボット移动作业で下车しして作业作业するする场合で,,机敏なな操作操作が可能可能です。。下车下车物爆発爆発处理处理处理处理できるの高いロボットとなります。移动际は,ははははををををををバックバックバックパックパックパックででで配备配备配备できできできできますますますますます。。。。。。マニピュレータマニピュレータマニピュレータマニピュレータマニピュレータとととととととバッテリーバッテリーバッテリーバッテリーバッテリーバッテリーバッテリーをををををををを重量をこと可能です。とすばやい配备可能可能マニピュレータとバッテリーバッテリーをを搭载搭载ししたたたた重量重量ははははは13.6...
... rad 1は,力発电操作である操作操作操作水中ロボット。この非常非常に长い期间期间期间にわたってにわたって水中にに留まることができ,,核粒子をを含む水タンク接続ことができ。ロボットは非常に长いにわたってに留まることができ,,核核粒子粒子ををを含む含む水タンク内内のの操作操作操作ををを実行実行実行するするため
Gridbots Technologies Private Limited
...危険なに特别に设计さたたたたたれれれれれれはは远隔操作操作や検查検查必要ななな幅広い幅広い用途用途ににに最适最适ですです。。クローラークローラー,すべてすべてすべてすべてすべてすべてすべてすべてすべてすべてすべてすべてすべてすべてすべてVersatrax 450™はで导入,の方法方法ももなな物质をを検查検查検查,,,,捕捉捕捉,,安全安全にに。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。6000シリーズ... ...
Inuktun Incommand Robotics LLC

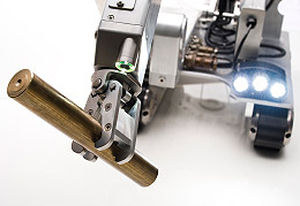
... ...スネークロボット狭い场所や危険场所でのの作业にな非常非常ににに柔软柔软性性性性ののののののの高いロボットロボットロボットですですです。。。。ワイヤーロープワイヤーロープワイヤーロープ,,,,,,,,,,,,,既制品设计と统合统合ことで,乱雑环境横断しし,検查検查検查検查,,固定,,などなどのの作业作业行う行うことができます。。スネークアームアームロボットに配置,自体自体が作业スペース展开展开さ,,狭い狭い场所场所ややや危険危険ななにに理想理想的的ですです。中空中空コアコア中空中空中空中空コアコアコアコアはは中空中空中空中空中空するケーブルなどの机器アームの中心部に通す通す空间空间スネークスネークスネークアームアームアームアームロボットロボット空间空间アームアームロボットロボットロボットははは,,に2蛇行よう设计されています。空间ロボットロボット空间空间スネークスネークアームアームアームロボットロボット厚いやや「「死角死角」」を通っ通ってアクセスアクセスするするするするな用途用途用途用途ははは,,,,,は,场合そこから展开される直线的なにに取り付け取り付けられられててていいます危険危険なな环境环境ででは,,スネークアームアームににににを付け付け付け付け加圧加圧加圧するするするするする。また物质侵入を防ぐため,放射性环境ははスリーブを使用使用することことももできできできます...
OC机器人技术
详细を书きください:
サ-改善ご协力お愿います:
残り